Или, к примеру, двигаетесь вы по городу, который неплохо знаете, на личном транспорте, но заехали в какие-то переулки, имеющие сложную форму. Вы знаете, направление, в котором вам необходимо ехать, но из-за постоянных поворотов на непрямые углы легко сбиться. Тут достаточно обычного компаса, чтобы понимать, в какую сторону вам нужно поворачивать.
Один из вариантов прибора для таких задач, собранного на базе микроконтроллера ESP32 и GPS-приёмника, представлен ниже.
Комплектующие
Heltec WiFi Kit 32
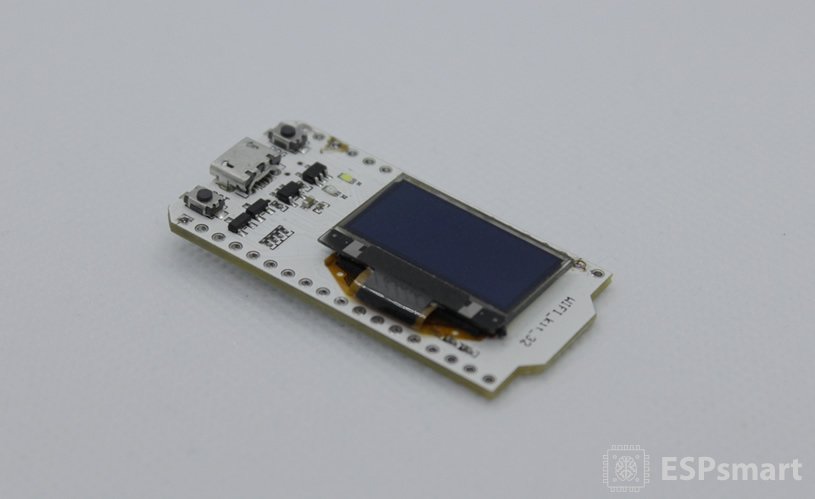
Эта плата удобна тем, что там есть уже почти всё самое необходимое:
- Микроконтроллер ESP32
- Дисплей на чипе SSD1306 с разрешением 128x64 пикселя
- Возможность запитаться от аккумулятора
- Возможность зарядить аккумулятор через разъём microUSB
При этом у платы очень небольшие размеры, что для нас очень удобно. Разумеется, можно использовать все эти компоненты по отдельности.
GPS-модуль NEO-M8M

Подойдёт любой GPS-модуль, передающий данные по UART-интерфейсу по протоколу NMEA.
На фото уже припаян 4-пиновый разъём, чтобы модуль можно было подключить через интерфейс USB-to-UART к компьютеру и настроить утилитой «u-center».
Транзисторная обвязка управления питанием GPS-модуля
- Резистор 100 кОм
- Резистор 1-10 кОм
- Полевой транзистор p-типа (например, IRLML5203)
Блок из четырёх кнопок
Кнопки нужны, чтобы включать и выключать устройство и запоминать точки – по одной на каждую кнопку. Поэтому, если вы не нашли точно такого же блока с кнопками или хотите использовать какие-то другие кнопки, их может быть больше или меньше указанных, только придётся подправить скетч.
Li-Ion аккумулятор

Тут использован SD 603450
Управление питанием
Вариант 1 – наиболее простой. Поставить движковый выключатель в разрыв одного из проводов к аккумулятору. Способ весьма прост в реализации, удобен для тех, кто не хочет заморачиваться с транзисторами. Но у него есть два минуса:
в корпусе надо делать ещё одно отверстие под выключатель,
чтобы зарядить аккумулятор, надо держать устройство включенным.

Вариант 2 – более сложный, программный способ. Суть его заключается в том, чтобы одной из кнопок, подключенной к пинам ESP-32, управлять логическим состоянием «вкл/выкл». При логическом «выкл» процессор должен отправляться в сон и только иногда просыпаться и проверять состояние кнопок, на случай необходимости включить по этой кнопке. Ничем больше процессор заниматься не должен, чтобы максимально экономить заряд аккумулятора.
Кроме этого надо выключить дисплей, это можно сделать программно.
Но это ещё не всё. Основной потребитель у нас – GPS-модуль, поэтому отключать надо так же и его. Способов отключать его программно не нашлось, поэтому было принято решение сделать транзисторную обвязку для управления питанием, которую надо подключить к отдельному пину ESP-32.
Т.к. решение, каким вариантом сделать тут управление питанием несколько раз менялось, то на фото где-то есть транзисторная обвязка, где-то нет.
Схема подключения
Схема проста до безобразия – просто подключаем проводами GPS модуль и блок кнопок к плате с микроконтроллером: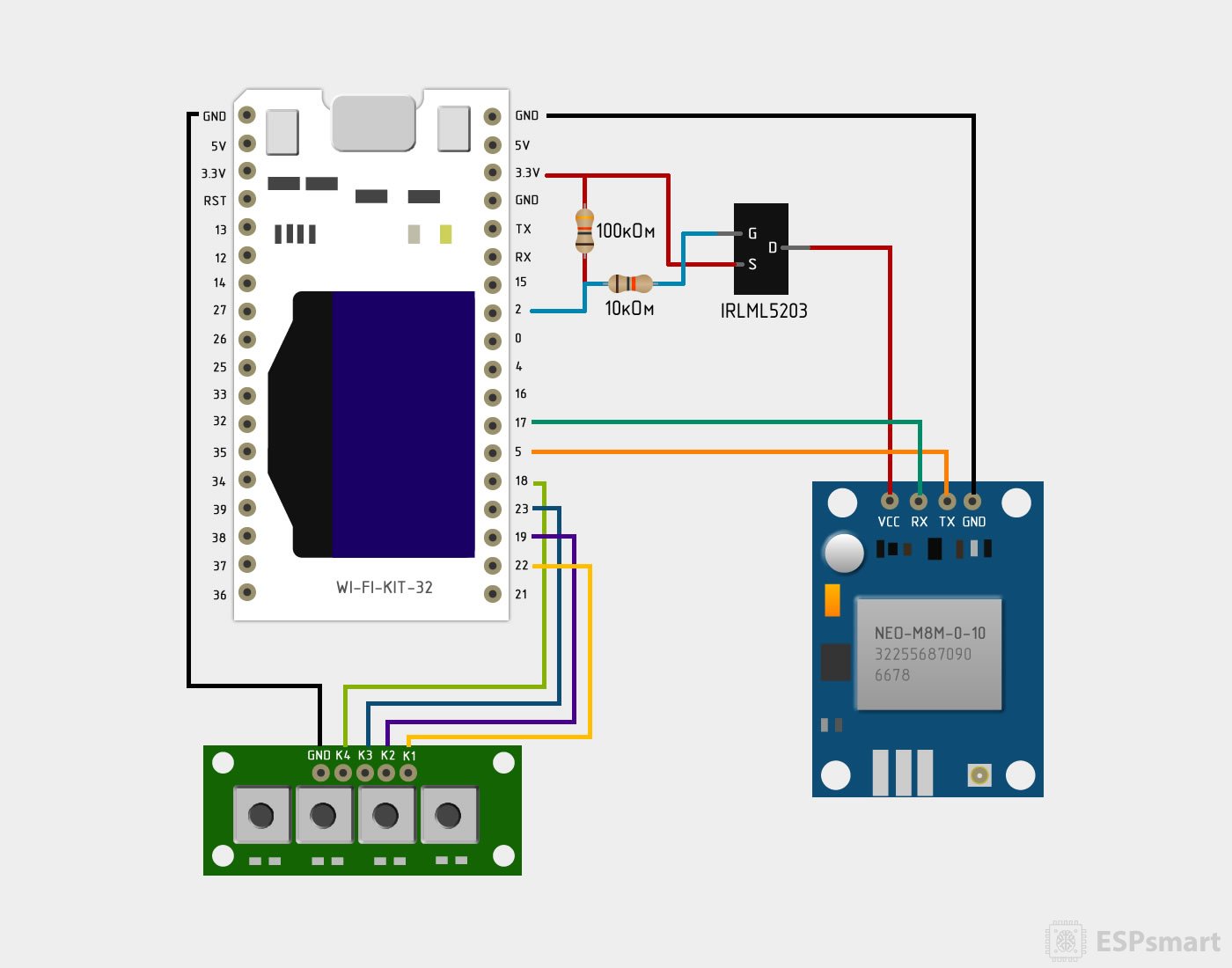
Пины специально подобраны так, чтобы провода не пересекались и не перекручивались. Это придаёт аккуратности сборке и позволяет максимально плотно потом упаковать это в корпусе.
Сборка
Как могут выглядеть спаянные между собой модули (на этом фото ещё нет управления питанием GPS-модуля):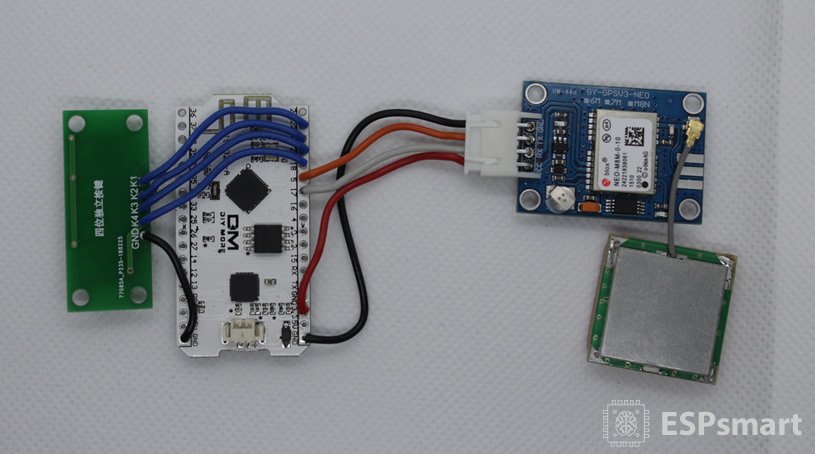


Собрано в корпусе (а тут управление питанием GPS-модуля уже присутствует – в жёлтой термоусадке):




Конечный вариант:


Итоги
Таким несложным образом можно изготовить устройство с хорошим GPS-приёмником.Конечно же, у этого устройства есть ряд недостатков, и в следующей версии мы обязательно попробуем их устранить.
Файлы для скачивания
3D модель корпуса ч. 13D модель корпуса ч. 2
Показать / Cкрыть скетч
#include "SSD1306.h"
SSD1306 display(0x3c, 4, 15);
#include <TinyGPS++.h>
TinyGPSPlus gps;
// будем использовать стандартный экземпляр класса HardwareSerial,
// т.к. он и так в системе уже есть и память под него выделена
#define ss Serial1
#include <EEPROM.h>
// пины кнопок: вкл/выкл, точка-1, точка-2, точка-3
const uint8_t btnpin[] = { 18, 23, 19, 22 };
// пин для управления питанием переферией
#define POWER_PIN 2
static bool is_on = true;
// текущая выбранная точка
static uint8_t pnt = 0;
// данные по всем сохранённым точкам
#define EEPROM_MGC1 0xe4
#define EEPROM_MGC2 0x7a
typedef struct __attribute__((__packed__)) { // структура для хранения точек в eeprom
uint8_t mgc1 = EEPROM_MGC1; // mgc1 и mgc2 служат для валидации текущих данных в eeprom
struct __attribute__((__packed__)) {
bool used = false;
double lat = 0;
double lng = 0;
} pnt[3];
uint8_t mgc2 = EEPROM_MGC2;
} eeprom_point_t;
static eeprom_point_t pntall;
void pntLoad();
//------------------------------------------------------------------------------
void setup() {
Serial.begin(115200);
Serial.println("begin");
// пин управление питанием GPS-модуля
pinMode(POWER_PIN, OUTPUT);
// инициализируем дисплей
// pin:16 - это reset дисплея, его надо перевести сначала в LOW,
// потом обратно в HIGH и так оставить
pinMode(16, OUTPUT);
digitalWrite(16, LOW);
delay(50);
digitalWrite(16, HIGH);
delay(50);
// теперь инициализация самой библиотеки дисплея
display.init();
display.clear();
display.flipScreenVertically();
if (is_on) {
pwrOn();
char s[100];
strcpy_P(s, PSTR("initialisizing..."));
display.setFont(ArialMT_Plain_16);
display.drawString(0, 0, s);
display.display();
}
else {
pwrOff();
}
// инициируем uart-порт GPS-приёмника
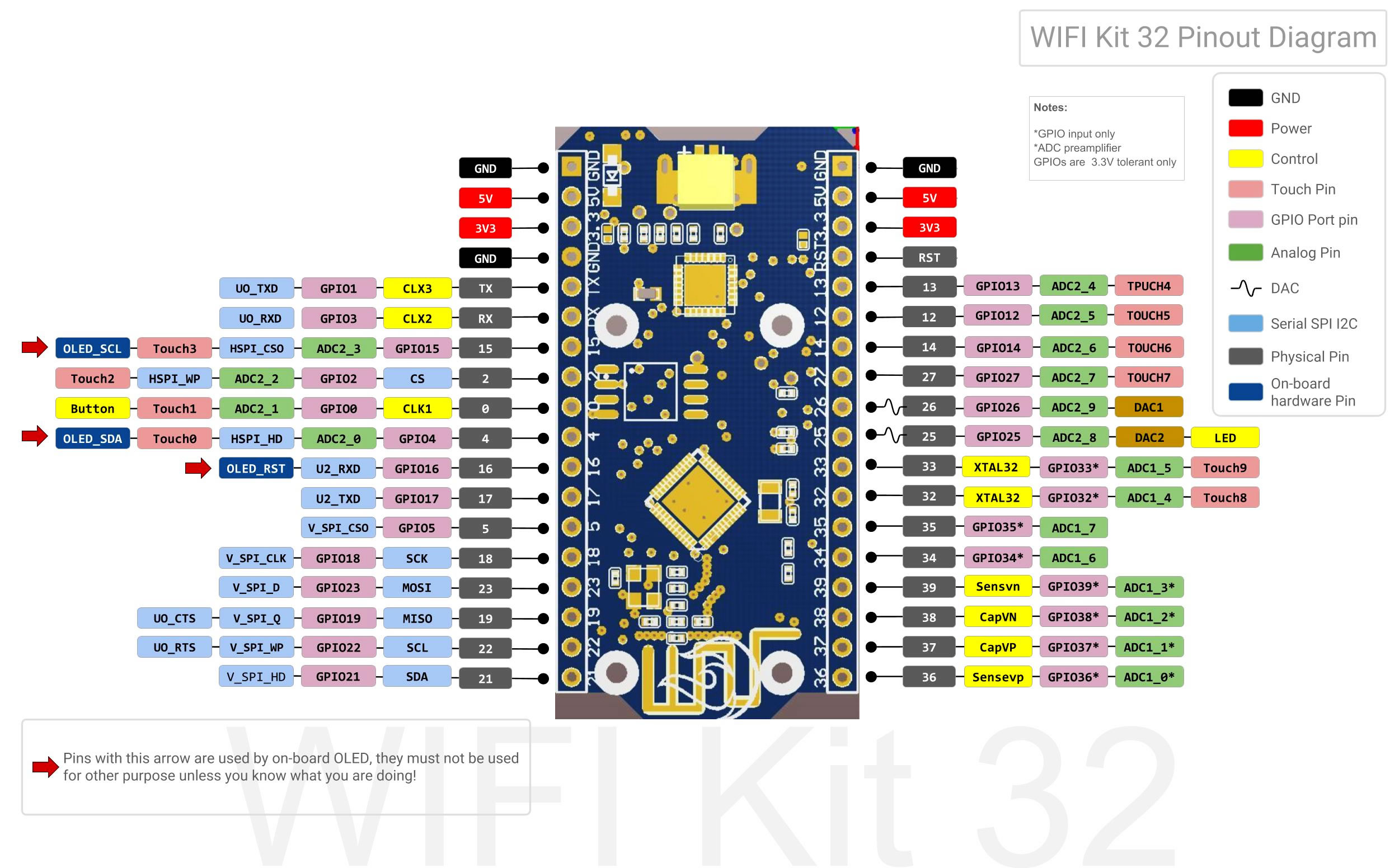
// Стандартные пины для свободного аппаратного Serial2 (16, 17) мы не можем использовать,
// т.к. пин-16 используется дисплеем в этой плате, поэтому нам всё равно, какие пины использовать,
// для удобства монтажа возьмём pin-5 и pin-17, при этом UART останется таким же аппаратным
ss.begin(9600, SERIAL_8N1, 5, 17);
// инициируем пины кнопок
for (auto pin : btnpin)
pinMode(pin, INPUT_PULLUP);
// загружаем сохранённые координаты точек
pntLoad();
}
/* ------------------------------------------------------------------------------------------- *
* Функция мигания сообщением
* ------------------------------------------------------------------------------------------- */
static void (*msgFlashFunc)() = NULL;
static uint32_t msgFlashEnd = 0;
void msgFlash(void (*func)(), uint32_t interval = 3500) {
msgFlashFunc = func;
msgFlashEnd = millis() + interval;
}
bool msgFlashUpd() {
if ((msgFlashFunc == NULL) || (msgFlashEnd == 0))
return false;
uint32_t d = millis();
if (d > msgFlashEnd) {
msgFlashFunc = NULL;
msgFlashEnd = 0;
return false;
}
if ((msgFlashEnd-d) & 0x100)
msgFlashFunc();
return true;
}
//------------------------------------------------------------------------------
void _drawPnt(int8_t x = 63, int8_t y = 31) {
display.fillCircle(x, y, 16);
auto col = display.getColor();
display.setColor(INVERSE);
display.setFont(ArialMT_Plain_24);
char s[10];
sprintf_P(s, PSTR("%d"), pnt);
display.drawString(x-6, y-13, s);
display.setColor(col);
}
void flashPntSelect() {
_drawPnt();
}
void flashPntReached() {
_drawPnt();
char s[] = { '!', 'o', 'k', '!', 0 };
display.drawString(88, 18, s);
display.drawString(0, 18, s);
}
void flashPntSave() {
_drawPnt(20);
char s[10];
strcpy_P(s, PSTR("Saved!"));
display.drawString(45, 18, s);
}
void flashPntClear() {
_drawPnt(20);
char s[10];
strcpy_P(s, PSTR("Cleared"));
display.drawString(45, 18, s);
}
/* ------------------------------------------------------------------------------------------- *
* Функции хранения координат кнопок
* ------------------------------------------------------------------------------------------- */
void pntLoad() {
EEPROM.begin(sizeof(eeprom_point_t));
eeprom_point_t *p = (eeprom_point_t *)EEPROM.getDataPtr();
if ((p->mgc1 == EEPROM_MGC1) && (p->mgc2 == EEPROM_MGC2)) {
pntall = *p;
}
else {
eeprom_point_t pntall1;
pntall = pntall1;
}
EEPROM.end();
}
void pntSave() {
if (!gps.location.isValid() || (pnt == 0))
return;
pntLoad();
pntall.pnt[pnt-1].used = true;
pntall.pnt[pnt-1].lat = gps.location.lat();
pntall.pnt[pnt-1].lng = gps.location.lng();
EEPROM.begin(sizeof(eeprom_point_t));
*((eeprom_point_t *)EEPROM.getDataPtr()) = pntall;
EEPROM.commit();
EEPROM.end();
msgFlash(flashPntSave);
}
void pntClear() {
if (pnt == 0)
return;
pntLoad();
if (!pntall.pnt[pnt-1].used)
return;
pntall.pnt[pnt-1].used = false;
pntall.pnt[pnt-1].lat = 0;
pntall.pnt[pnt-1].lng = 0;
EEPROM.begin(sizeof(eeprom_point_t));
*((eeprom_point_t *)EEPROM.getDataPtr()) = pntall;
EEPROM.commit();
EEPROM.end();
msgFlash(flashPntClear);
}
/* ------------------------------------------------------------------------------------------- *
* Функция вкл/выкл питания
* ------------------------------------------------------------------------------------------- */
void pwrOn() {
is_on = true;
display.displayOn();
digitalWrite(POWER_PIN, LOW);
}
void pwrOff() {
is_on = false;
display.displayOff();
digitalWrite(POWER_PIN, HIGH);
}
/* ------------------------------------------------------------------------------------------- *
* Функция слежения за состояниями кнопок
* ------------------------------------------------------------------------------------------- */
void btnRead() {
static bool psh[] = { false, false, false, false };
static uint32_t pshlong = 0, pshlonglong = 0;
int n = 0;
for (auto pin : btnpin) {
bool pushed = digitalRead(pin) == LOW;
if (pushed && !psh[n]) {
// Кнопка только что нажата
if (n == 0) {
// кнопка "вкл-выкл"
if (!is_on)
pwrOn();
}
else {
// кнопки "точка-1-2-3" - переключаем на нужную точку
pnt = n;
if (pntall.pnt[pnt-1].used)
msgFlash(flashPntSelect, 1300);
}
pshlong = millis() + 4000;
pshlonglong = millis() + 10000;
}
else
if (pushed && psh[n] && (pshlong > 0) && (pshlong < millis())) {
// Кнопка долго удерживается
pshlong = 0; // чтобы событие сработало однократно до момента отпускания кнопки
if (n == 0) {
// кнопка "вкл-выкл"
if (is_on)
pwrOff();
}
else {
// кнопки "точка-1-2-3" - запоминаем новые координаты точки
pntSave();
}
}
else
if (pushed && psh[n] && (pshlonglong > 0) && (pshlonglong < millis())) {
// Кнопка очень долго удерживается
pshlonglong = 0; // чтобы событие сработало однократно до момента отпускания кнопки
if (n > 0) {
// кнопки "точка-1-2-3" - стираем координаты точки
pntClear();
}
}
psh[n] = pushed;
if (!is_on) break;
n++;
}
}
/* ------------------------------------------------------------------------------------------- *
* Функция отрисовки компаса, провёрнутого на угол ang
* ------------------------------------------------------------------------------------------- */
// PNT - Конвертирование координат X/Y при вращении вокруг точки CX/CY на угол ANG (рад)
#define PNT(x,y,ang,cx,cy) round(cos(ang) * (x - cx) - sin(ang) * (y - cy)) + cx, round(sin(ang) * (x - cx) + cos(ang) * (y - cy)) + cy
// APNT - упрощённая версия PNT, где ANG берётся автоматически из текущей зоны видимости кода
#define APNT(x,y,cx,cy) PNT(x,y,ang,cx,cy)
inline void drawCompas(float ang) {
char s[] = { 'N', 0 };
display.setFont(ArialMT_Plain_10);
display.drawCircle(32, 31, 1);
//display.drawCircle(32,31, 31);
display.drawString(APNT(29,0,29,25), s);
display.drawCircle(APNT(32,6,32,31), 6);
s[0] = 'S';
display.drawString(APNT(29,50,29,25), s);
s[0] = 'W';
display.drawString(APNT(5,25,29,25), s);
s[0] = 'E';
display.drawString(APNT(53,25,29,25), s);
}
/* ------------------------------------------------------------------------------------------- *
* Функция отрисовки стрелки направления к точке внутри компаса
* ------------------------------------------------------------------------------------------- */
inline void drawPointArrow(float ang) {
display.drawLine(APNT(32,15,32,31), APNT(32,42,32,31));
display.drawLine(APNT(32,15,32,31), APNT(28,20,32,31));
display.drawLine(APNT(32,15,32,31), APNT(36,20,32,31));
display.drawLine(APNT(32,42,32,31), APNT(28,47,32,31));
display.drawLine(APNT(32,42,32,31), APNT(36,47,32,31));
}
/* ------------------------------------------------------------------------------------------- *
* Функция отрисовки всей информации о GPS
* ------------------------------------------------------------------------------------------- */
inline void drawInfo() {
char s[50];
display.setFont(ArialMT_Plain_10);
// количество спутников в правом верхнем углу
if (gps.satellites.value() > 0)
sprintf_P(s, PSTR("sat: %d"), gps.satellites.value());
else
strcpy_P(s, PSTR("no sat :("));
display.drawString(90, 0, s);
if (gps.satellites.value() == 0)
return;
// Текущие координаты
if (gps.location.isValid()) {
sprintf_P(s, PSTR("la:%f"), gps.location.lat());
display.drawString(65, 12, s);
sprintf_P(s, PSTR("lo:%f"), gps.location.lng());
display.drawString(65, 24, s);
}
bool in_pnt = false;
if (gps.location.isValid() && (pnt > 0) && pntall.pnt[pnt-1].used) {
double dist =
TinyGPSPlus::distanceBetween(
gps.location.lat(),
gps.location.lng(),
pntall.pnt[pnt-1].lat,
pntall.pnt[pnt-1].lng
);
in_pnt = dist < 8.0;
display.setFont(ArialMT_Plain_24);
if (dist < 950)
sprintf_P(s, PSTR("%dm"), (int)round(dist));
else if (dist < 9500)
sprintf_P(s, PSTR("%0.1fkm"), dist/1000);
else if (dist < 950000)
sprintf_P(s, PSTR("%dkm"), (int)round(dist/1000));
else
sprintf_P(s, PSTR("%0.2fMm"), dist/1000000);
display.drawString(65, 36, s);
}
static bool in_pnt_prev = false;
if (!in_pnt_prev && in_pnt)
msgFlash(flashPntReached);
in_pnt_prev = in_pnt;
// Компас и стрелка к точке внутри него
if (gps.course.isValid() && gps.location.isValid()) {
// Компас показывает, куда смещено направление нашего движения
// относительно сторон Света,
drawCompas(DEG_TO_RAD*(360 - gps.course.deg()));
// а стрелка показывает отклонение направления к точке относительно
// направления нашего движения
if ((pnt > 0) && pntall.pnt[pnt-1].used) {
if (in_pnt) {
display.drawCircle(32, 31, 10);
display.drawCircle(32, 31, 15);
}
else {
double courseto =
TinyGPSPlus::courseTo(
gps.location.lat(),
gps.location.lng(),
pntall.pnt[pnt-1].lat,
pntall.pnt[pnt-1].lng
);
drawPointArrow(DEG_TO_RAD*(courseto-gps.course.deg()));
}
display.fillCircle(32, 31, 6);
auto col = display.getColor();
display.setColor(INVERSE);
sprintf_P(s, PSTR("%d"), pnt);
display.drawString(30, 25, s);
display.setColor(col);
}
}
}
//------------------------------------------------------------------------------
void loop() {
// читаем состояние кнопок
btnRead();
if (!is_on) {
delay(100);
return;
}
// Считывание данных с GPS - не более 50мс
uint32_t m = millis()+50;
do {
char s;
while (ss.available())
gps.encode(s=ss.read());
} while (millis() < m);
// Начинаем отрисовку данных на дисплее
display.clear();
if (msgFlashUpd()) {
// message flashing
}
else
if (gps.satellites.isValid()) {
// Данные с GPS получены, рисуем инфо:
drawInfo();
}
else {
// Если мы не можем узнать даже кол-во спутников,
// то видимо данных ещё совсем нет,
// в это время совсем ничего не рисуем
char s[30];
display.setFont(ArialMT_Plain_16);
strcpy_P(s, PSTR("Waiting GPS"));
display.drawString(20, 20, s);
strcpy_P(s, PSTR("data..."));
display.drawString(50, 40, s);
}
display.display();
Serial.println(gps.satellites.value());
delay(200);
}


{kind=link}